Open-World Drone Active Tracking with Goal-Centered Rewards
South China University of Technology,
Institute for Super Robotics (Huangpu),
Pazhou Laboratory,
Peng Cheng Laboratory,
Sun Yat-sen University
NIPS 2025 (Poster)
Abstract
Drone Visual Active Tracking aims to autonomously follow a target object by controlling the motion system based on visual observations, providing a more practical solution for effective tracking in dynamic environments. However, accurate Drone Visual Active Tracking using reinforcement learning remains challenging due to the absence of a unified benchmark and the complexity of open-world environments with frequent interference. To address these issues, we pioneer a systematic solution. First, we propose DAT, the first open-world drone active air-to-ground tracking benchmark. It encompasses 24 city-scale scenes, featuring targets with human-like behaviors and high-fidelity dynamics simulation. DAT also provides a digital twin tool for unlimited scene generation. Additionally, we propose a novel reinforcement learning method called GC-VAT, which aims to improve the performance of drone tracking targets in complex scenarios. Specifically, we design a Goal-Centered Reward to provide precise feedback across viewpoints to the agent, enabling it to expand perception and movement range through unrestricted perspectives. Inspired by curriculum learning, we introduce a Curriculum-Based Training strategy that progressively enhances the tracking performance in complex environments. Besides, experiments on simulator and real-world images demonstrate the superior performance of GC-VAT, achieving an approximately 400% improvement over the SOTA methods in terms of the cumulative reward metric.
Benchmark

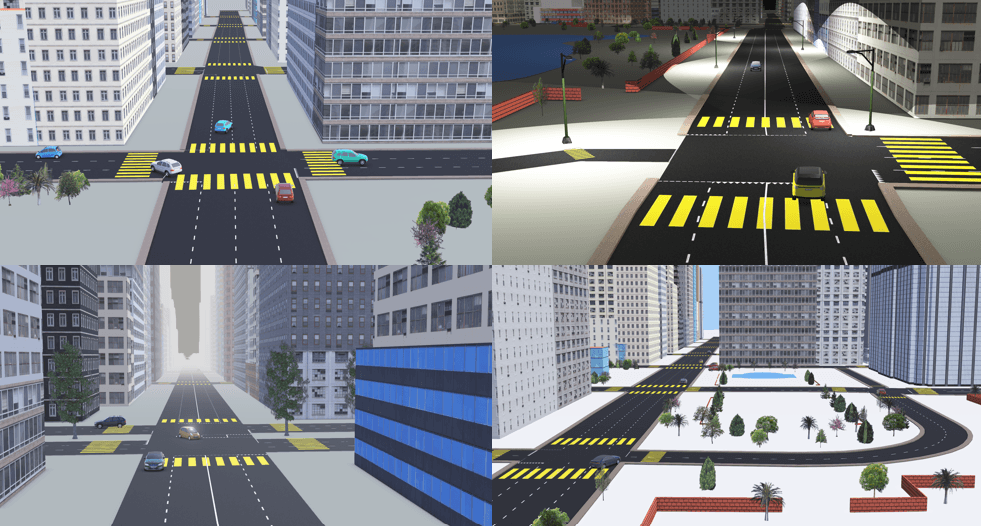
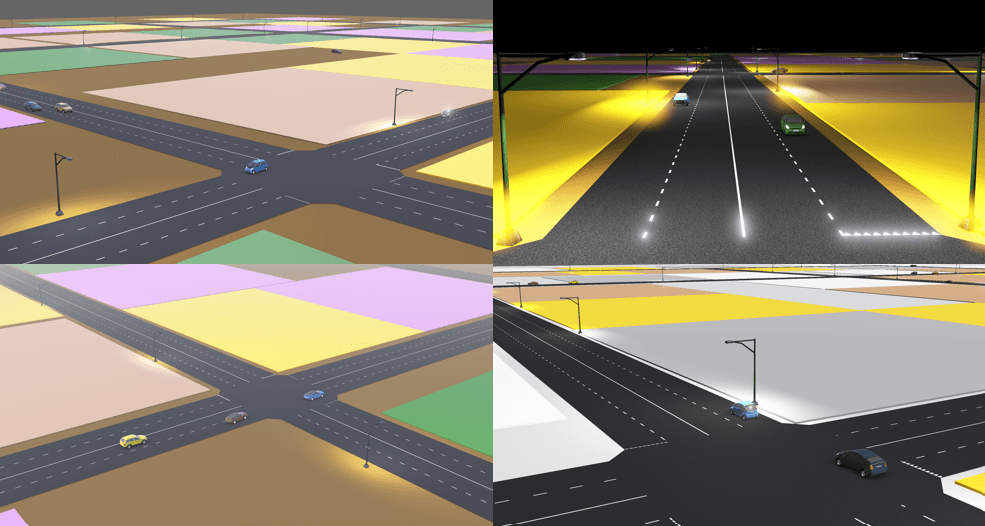
24 Scenarios
24
Tracking Targets
Rich
Perceptual Information
Complex
Scenario Design
Realistic
Traffic Management
Realistic
Dynamics Simulation
01
CityStreet
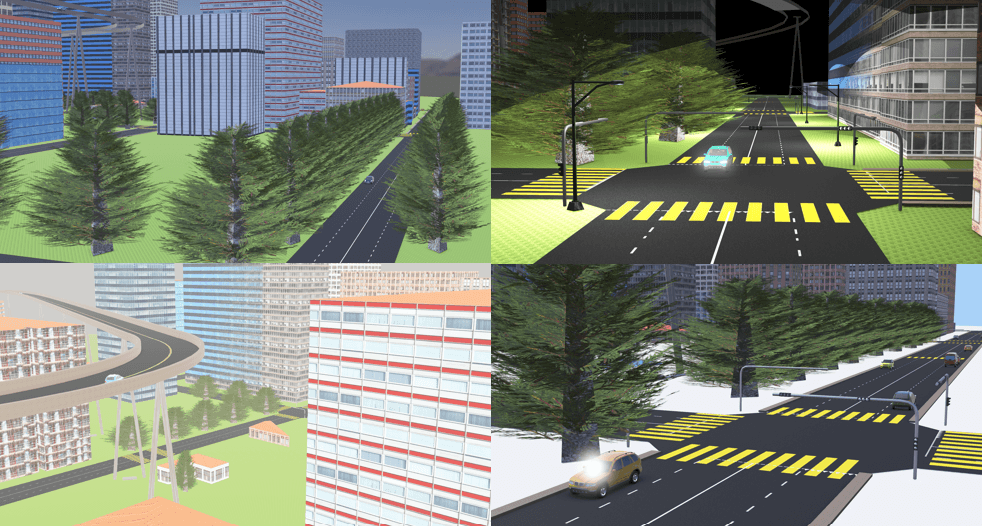
Village

02
Lake

03
Downtown
04
Farmland
05
Desert

06
MOTORBIKE

SCOOTER
TRAILER
TRUCK
BUS

TESLAModel3

LINKOLNMKZ

RANGEROVER

BENZSprinter

TOYOTAPrius

BMWX5

CITROENCZero

PEDESTRIAN

SHRIMP

CREATE

SOJOURNER
MANTIS

BB_8
AIBOERS7

BIOLOIDDOG
FIREBIRD6
SCOUT
GHOSTDOG2
HOAP2
Performance
We conduct within-scene, cross-scene and cross-domain tests. In cross-scene testing, the agent trained under daytime conditions in one environment is tested in different scenarios with the same weather. For cross-domain testing, it is evaluated in the same scene but under varying weather conditions.
1. Within-scene and cross-scene
Our R-VAT performs significantly better than other methods as shown in Tab. 1. In within-scene testing, for the CR, the average performance improvement on six maps relative to the D-VAT method is 591%(35 → 242). Regarding the TSR, the average enhancement is 279%(0.19 → 0.72). In cross-scene testing, R-VAT achieves a 376%(37 → 176) improvement in average CR and a 200%(0.19 → 0.57) improvement in average TSR compared to D-VAT.

2. Cross-domain
As shown in Tab. 2, our method outperforms existing methods significantly in cross-domain generalization. Specifically, the R-VAT demon-strates an average CR enhancement of 509%(35 → 213) relative to D-VAT and T SR boost of 253%(0.19 → 0.67).
