
Case Studies
针对问题
现有方法:PVT任务假设目标在预设镜头内,在视频维度进行跟踪
现实任务:现实视觉任务,目标具有高动态特性,主动控制相机以提升视觉准确率是主要挑战
VAT任务:VAT任务同时建模视觉跟踪和控制,更具现实意义

强化学习解决VAT任务
现有方法:直接串联VT模型和控制模型进行VAT(siamask+PID)
局限1:VT模型的延迟带来控制输入的滞后,甚至导致控制器发散
局限2:控制模型对参数特别敏感,需要对每个场景微调参数
RL优点:可以用MDP将视觉和控制同时建模,用单模型解决
仿真环境:RL现实环境试错和数据采集太昂贵,需建构仿真环境
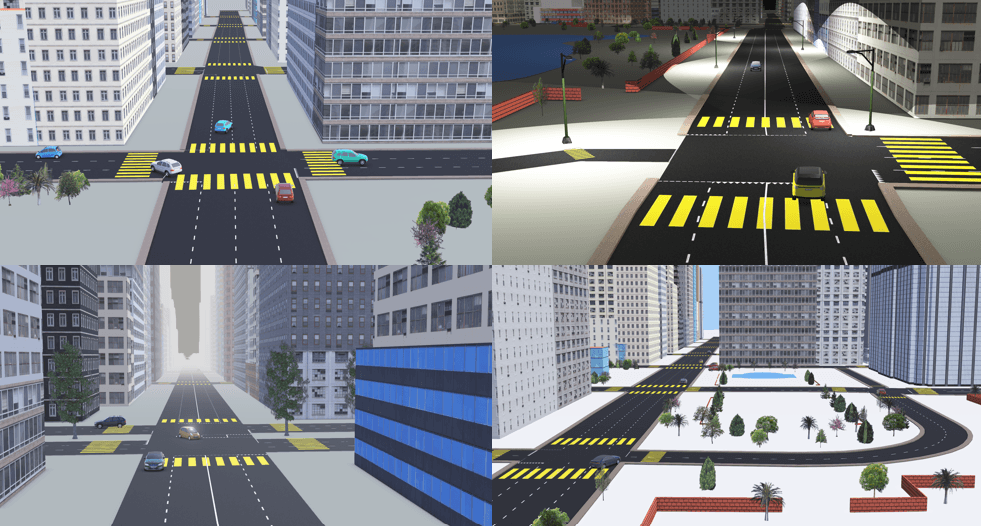
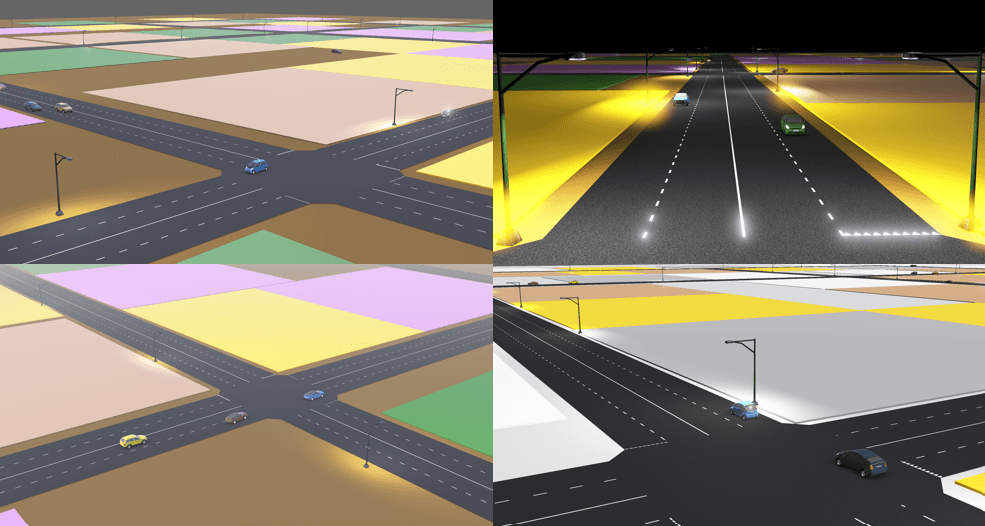
复杂多样的仿真环境
真实性:建模真实环境的多样性,丢弃真实场景不可获取的变量
多样性:多场景,多种tracker和target,多传感器
不可获取的变量:target相对于tracker的位置,速度,加速度

01
CityStreet
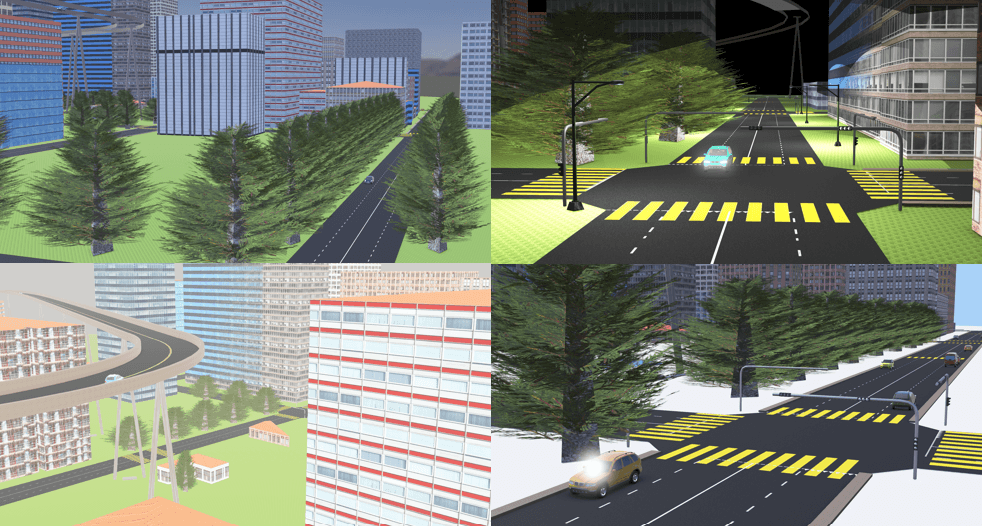
Village

02
Lake

03
Downtown
04
Farmland
05
Desert

06
MOTORBIKE

SCOOTER
TRAILER
TRUCK
BUS

TESLAModel3

LINKOLNMKZ

RANGEROVER

BENZSprinter

TOYOTAPrius

BMWX5

CITROENCZero

PEDESTRIAN

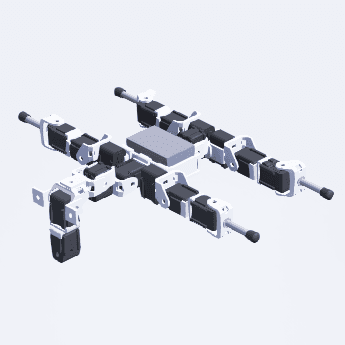
SHRIMP

CREATE

SOJOURNER
MANTIS

BB_8
AIBOERS7

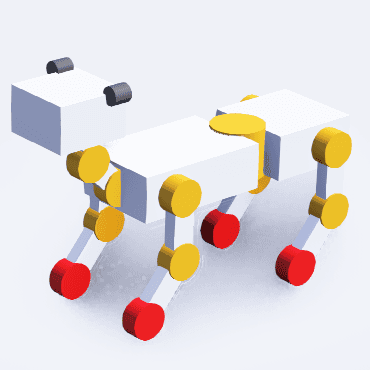
BIOLOIDDOG
FIREBIRD6
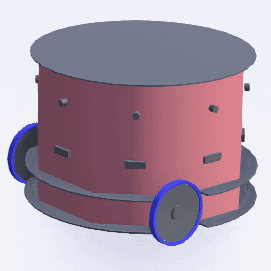
SCOUT
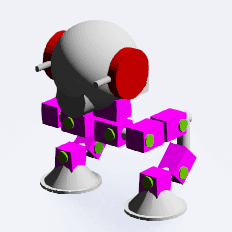
GHOSTDOG2
HOAP2




Upgrade your Web
presence with Framer
Schedule a call with Goran B.

Get Athos Pro